過程控制
PID控制中有P、I、D三個(gè)參數(shù),只有明白這三個(gè)參數(shù)的含義和作用才能完成控制器PID參數(shù)整定,讓控制器到達(dá)最佳控制效果。昌暉儀表在本文給大家介紹PID控制中P、I、D參數(shù)的作用。 比例作用比例控制器實(shí)際上就是個(gè)放大倍數(shù)可調(diào)的放大器,即△P=Kpe,式中Kp為比例增益,即Kp可大于1…
溫度控制系統(tǒng)首先要組成系統(tǒng)整體高精度的控溫系統(tǒng),并分析溫度對象的特點(diǎn)和控溫影響因素,結(jié)合工況整定最佳PID控制參數(shù),才能達(dá)到精確控制的目的

常有從事PLC應(yīng)用的工程師調(diào)侃PID調(diào)節(jié)器,認(rèn)為PLC的PID已經(jīng)可以替代PID調(diào)節(jié)器,事實(shí)真相果真如此?昌暉儀表對比分析PID調(diào)節(jié)器的PID和PLC的PID在設(shè)置、編程和應(yīng)用方面的異同和特點(diǎn),讓大家客觀認(rèn)知PID調(diào)節(jié)器和PLC的應(yīng)用

從工程實(shí)踐看,反饋是用于減少不確定性的低成本方法。所以就有反饋萬能論。中國科學(xué)院院士、中國科學(xué)院數(shù)學(xué)與系統(tǒng)科學(xué)研究院研究員郭雷表示:“不確定性無處不在,人們也總是想盡各種辦法‘對付’不確定性,以達(dá)到調(diào)控目的或期望目標(biāo)。但是,就像我們在理想化的封閉環(huán)境中通過…
在現(xiàn)代工業(yè)控制系統(tǒng)中,PID控制器因其結(jié)構(gòu)簡單、易于實(shí)現(xiàn)、效果穩(wěn)定而被廣泛應(yīng)用。然而,在實(shí)際工程實(shí)踐中,尤其是在處理高頻干擾和快速動(dòng)態(tài)響應(yīng)時(shí),微分作用不僅不是可有可無的輔助項(xiàng),反而是回路調(diào)節(jié)中不可或缺的核心組成部分。本文將從整定方法、工業(yè)場景、理論分析、整定方…
有儀表工問:既然PID參數(shù)整定有Lambda整定方法,也有相關(guān)的整定工具,有沒有PID參數(shù)自整定的軟件產(chǎn)品呢?很明確的回答,到目前為止都沒有開發(fā)PID參數(shù)自整定產(chǎn)品的計(jì)劃。那么PID參數(shù)能否自整定呢?如果被控對象模型確定,當(dāng)然是能夠自整定的。但是要講條件,還要考慮風(fēng)險(xiǎn)和成本…

前饋控制用的比較少,甚至比串級控制還要少。但是當(dāng)干擾來自過程側(cè)而且比較頻繁時(shí),使用前饋+反饋的組合控制模式,幾乎是唯一的解決方案。因?yàn)橛玫谋容^少如何設(shè)置前饋系數(shù),就成為一個(gè)困擾工程師的問題

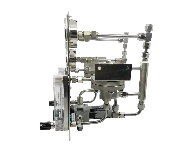
昌暉儀表YR9130-EX-N-HART(一入一出)和YR9132-EX-N-HART(二入二出)操作端隔離安全柵(支持HART協(xié)議)能夠接受來自處于安全區(qū)的DCS/PLC系統(tǒng)或其它操作器的直流電流4-20mA信號,經(jīng)HART操作端隔離安全柵隔離傳送后,輸出直流電流4-20mA,驅(qū)動(dòng)處于危險(xiǎn)現(xiàn)場的電氣轉(zhuǎn)換器、閥門定位器、…

對于本質(zhì)安全回路的正確選用與使用安全柵是非常關(guān)鍵的。為了能夠正確地選用安全柵,構(gòu)成合理的本安回路,必須既要從經(jīng)濟(jì)性方面來考慮又要從可靠性及實(shí)用性方面考慮,因此合理選用與使用安全柵在工業(yè)與工程應(yīng)用中就顯得十分重要。安全柵的不恰當(dāng)選擇,不僅僅會(huì)帶來經(jīng)濟(jì)上的浪費(fèi)…

可燃?xì)怏w報(bào)警器初裝時(shí)需要進(jìn)行檢定/校準(zhǔn),這個(gè)要求在以下規(guī)范和標(biāo)準(zhǔn)有規(guī)定,昌暉儀表整理了相關(guān)標(biāo)準(zhǔn)和規(guī)范供大家參考

即便是被控對象是不確定的,但是還是要努力使用控制方案和PID參數(shù),逐漸實(shí)現(xiàn)零操作和零振蕩。所以雖然不確定,還是要認(rèn)識PID,掌握PID整定方法

PID擅長降低單變量過程的干擾不確定性;MPC擅長降低多變量過程的方案不確定性。有干擾所以離不開PID,方案不確定才需要MPC
過程控制大師Tore Hgglund教授在2019年發(fā)表的文章《The one-third rule for PI controller tuning》中提到了一個(gè)被反復(fù)提及的問題:PID現(xiàn)場實(shí)際應(yīng)用的狀況欠佳。他寫道:“一個(gè)過程控制裝置可能有成百上千個(gè)PID控制器。眾所周知,它們中的大多數(shù)都處于手動(dòng)模式,調(diào)得不好,或者…
分程控制在石油化工生產(chǎn)中比較常見,昌暉儀表在本文分享分程控制原理和分程控制應(yīng)用兩方面知識,方便儀表工構(gòu)建和用好分程控制系統(tǒng)。一個(gè)簡單的負(fù)反饋控制系統(tǒng),通常調(diào)節(jié)器的控制輸出只控制一個(gè)執(zhí)行器或控制閥,如圖1所示。圖1 單回路控制系統(tǒng)控制方框圖圖2 采用一個(gè)調(diào)節(jié)閥特…

本文詳細(xì)介紹P+F安全柵KFD2-STC4-EX1的詳細(xì)接線,包括現(xiàn)場側(cè)(危險(xiǎn)區(qū))和卡板側(cè)(安全區(qū)) 的端子連接步驟,適用于典型的二線制變送器與PLC/DCS系統(tǒng)的連接場景。1、KFD2-STC4-EX1端子定義與功能2、KFD2-STC4-EX1接線步驟①電源連接(端子1-2)◆端子1(+24V):接24V DC電源正極(通常來…
PI控制器可以消除余差,根本原因是在閉環(huán)中增加了一個(gè)原點(diǎn)極點(diǎn),將閉環(huán)系統(tǒng)從0型系統(tǒng)升級為1型系統(tǒng)。關(guān)于如何設(shè)置積分時(shí)間,一般的說法是積分時(shí)間大,積分作用弱,消除余差速度慢;積分時(shí)間小,積分作用弱,消除余差速度快。那么到底應(yīng)該如何設(shè)置積分時(shí)間呢?PI控制器同時(shí)還增…

德國倍加福KCD2-STC-EX1隔離安全柵用于兩線制、四線制變送器的模擬量輸入信號。KCD2-STC-EX1隔離安全柵的輸入、輸出、電源三端隔離,支持有源/無源電流信號或電壓信號輸出

控制優(yōu)化項(xiàng)目方法論:以操作事件為抓手,科學(xué)應(yīng)用過程控制工具,將零手動(dòng)操作為目標(biāo),用至簡至優(yōu)的工程方法,通過持續(xù)改進(jìn),提升裝置安全和效益
在工業(yè)現(xiàn)場PID控制效果不理想,根本原因不是PID控制算法能力不足,而往往是控制方案不合理、不會(huì)PID參數(shù)整定。如果參數(shù)和方案問題不解決,先進(jìn)控制也很難做好。如果參數(shù)和方案問題解決了,大部分問題不用先進(jìn)控制也能解決。用先進(jìn)控制是綜合成本考慮,先進(jìn)控制和PID各有千秋

做自動(dòng)化控制優(yōu)化項(xiàng)目的基本原則,包括分而治之、以簡馭繁、集思廣益、實(shí)事求是、持續(xù)改進(jìn)。本文具體說明

一入二出信號隔離器可以用于SIS系統(tǒng)。應(yīng)注意以下細(xì)節(jié)問題

要想把創(chuàng)新理論種在工業(yè)現(xiàn)場這片沃土,并生根發(fā)芽茁壯成長,就必須正視理想和現(xiàn)實(shí)的差距,找到跨越理想和現(xiàn)實(shí)之間鴻溝的技術(shù)路徑。解決實(shí)際問題需要決心、勇氣和智慧。企業(yè)要迎接新技術(shù)帶來的機(jī)遇和調(diào)整,要重視生產(chǎn)過程和管理運(yùn)營的自動(dòng)化工作,要重視自動(dòng)化人才培養(yǎng)

PFD(Process Flow Diagram,工藝流程圖)和P&ID(Piping and Instrumentation Diagram,管道及儀表流程圖)是化工、石油、制藥、電力等工程領(lǐng)域中常見的兩種技術(shù)圖紙。它們在工藝設(shè)計(jì)、設(shè)備選型、安裝調(diào)試和運(yùn)行維護(hù)等過程中起著重要作用。1、PFD(工藝流程圖)定義PFD主要用于…

制冷機(jī)組油溫控制這種有多個(gè)變化的被控變量,和多個(gè)操縱變量時(shí),先進(jìn)控制實(shí)現(xiàn)這種多變量油溫控制要簡單的多、靈活的多、安全的多
文章《液位自動(dòng)控制振蕩問題的解決方法》分享了液位控制振蕩的經(jīng)驗(yàn),本文從醫(yī)生的視角再和大家聊聊液位控制振蕩的解決方法。本文仍沿用《液位自動(dòng)控制振蕩問題的解決方法》中的案例。核心定律:穩(wěn)定的控制系統(tǒng)如同健康的心臟,任何規(guī)律性振蕩都是"心律失常"的警報(bào)信…

在精餾塔操作過程中,塔釜液位控制通常以塔釜采出作為主要調(diào)節(jié)手段。然而過程控制系統(tǒng)的復(fù)雜性在于,其始終存在特例工況的挑戰(zhàn):當(dāng)塔釜采出呈現(xiàn)間歇性操作、微流量運(yùn)行或受工藝約束需保持固定時(shí),傳統(tǒng)的液位-采出控制回路將失效。此類特殊工況下,需通過再沸器蒸汽流量調(diào)節(jié)、側(cè)…
定義問題:任何有規(guī)律的振蕩,都說明自動(dòng)控制回路有問題。在上圖的液位自動(dòng)控制中,采用出料控制液位。由于來料較少,而且PID參數(shù)不合適,調(diào)節(jié)閥一直在從全關(guān)到某個(gè)輸出之間振蕩。工藝人員根據(jù)物料平衡,將PID控制器輸出范圍限制在[-5 3],然后又減小到[-5 1]。通過控制器輸出…

過程控制(Process Control)和離散控制(Discrete Control)是自動(dòng)控制系統(tǒng)中的兩種主要控制方式,它們分別應(yīng)用于不同的工業(yè)場景。以下對過程控制和離散控制詳細(xì)講解,以及對比分析它們的主要區(qū)別

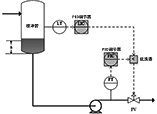
案例來自《Process Control-Engineering Analyses and Best Practices》:一個(gè)水處理過程,水被送到FWKO罐,然后流到氣/液分離器,去除水中的夾帶氣體。然后水被送到下游進(jìn)一步處理。流量由流量PID控制器調(diào)節(jié)。操作要求是通過操縱兩個(gè)流量控制閥來維持兩個(gè)液位。液位和流量測量…
使用Lambda整定方法整定PID參數(shù)行之有效,儀表工學(xué)習(xí)Lambda整定方法可以按照本文分享的步驟逐步進(jìn)行

液位控制系統(tǒng)、壓力控制系統(tǒng)和流量控制系統(tǒng)進(jìn)行串級控制時(shí),容易發(fā)生振蕩。概要一次控制系統(tǒng)和二次控制系統(tǒng)的固有振動(dòng)周期相近時(shí),容易產(chǎn)生振蕩。此時(shí),使一次控制系統(tǒng)的速度慢于(延長固有振動(dòng)周期)二次控制系統(tǒng)的速度,便能有效防止振蕩。即由一次系統(tǒng)改變二次系統(tǒng)的目標(biāo)值,…

使用冷水和熱水混合同時(shí)控制水溫和水量,熱水調(diào)節(jié)閥和冷水調(diào)節(jié)閥是兩個(gè)MV,水溫和水量是兩個(gè)CV。上圖左邊是兩個(gè)單回路,右邊是22的先進(jìn)控制方案。當(dāng)沒有約束時(shí),兩種控制方案是等價(jià)的。如果非要找點(diǎn)不同,在設(shè)定值變化時(shí),兩個(gè)單回路會(huì)互相影響。而先進(jìn)控制則可以同時(shí)考慮兩個(gè)…

GDS的作用是檢測泄漏,探測器設(shè)置是以泄漏到大氣環(huán)境中的介質(zhì)濃度為依據(jù)的,不是以管道內(nèi)的介質(zhì)成分為依據(jù)。煤氣中含有多種有毒氣體,探測器設(shè)置應(yīng)該以測毒為主,如果煤氣泄漏后大氣環(huán)境中HS的濃度也可能超過閥值,建議同時(shí)測CO和HS,其他組分毒氣可不檢測

當(dāng)使用PID設(shè)計(jì)控制方案時(shí),為了保證至簡至優(yōu),會(huì)強(qiáng)調(diào)MV的從一而終。MV控制權(quán)的切換會(huì)增加方案的復(fù)雜性,但是收益有限。簡單方案的適用范圍是有限的。嵌套控制方案,無論是設(shè)計(jì)難度還是理解難度都很大。當(dāng)使用APC進(jìn)行控制時(shí),變量和模型不變,僅僅通過控制要求和參數(shù)的不同就能…

在精餾塔控制中,實(shí)現(xiàn)物料平衡、維持操作條件、保證產(chǎn)品質(zhì)量是根本。所以物料平衡、能量平衡、防止漏液和液泛是需要考慮的控制方案。精餾塔溫度控制是精餾塔操作的錨點(diǎn),有了溫度控制精餾塔就不會(huì)工作點(diǎn)漂移。溫度控制也可能有各種問題

根據(jù)閉環(huán)階躍響應(yīng)曲線,能看出很多PID參數(shù)整定相關(guān)的知識,能看出趨勢背后蘊(yùn)含的知識,就可以減少開環(huán)測試時(shí)間提高效率
對汽油加氫裝置的操作數(shù)據(jù)進(jìn)行分析時(shí),發(fā)現(xiàn)反應(yīng)器進(jìn)料操作工需要頻繁調(diào)整。這說明原來的控制方案不符合實(shí)際的操作習(xí)慣。原設(shè)計(jì)的控制方案如下圖所示。FIC是反應(yīng)器進(jìn)料,一般要盡量保持穩(wěn)定。緩沖罐的進(jìn)料受到裝置負(fù)荷,進(jìn)料組成的影響具有不確定。為了實(shí)現(xiàn)這個(gè)工藝要求,同時(shí)防…

什么是控制回路的同相位振蕩?當(dāng)一個(gè)控制回路投自動(dòng)時(shí),表現(xiàn)出有規(guī)律的振蕩。有三種的情況:1、非線性振蕩過程變量方波,PID控制器輸出鋸齒波。這是PID控制器輸出非線性造成的,消除非線性是此時(shí)的首選。消除方法包括工作點(diǎn)移動(dòng)、調(diào)校定位器、維修或更換等;2、異相位振蕩當(dāng)PI…
PID誕生記節(jié)選自白志剛《自動(dòng)調(diào)節(jié)系統(tǒng)解析與PID整定》,分為中國古代的發(fā)明、沒有控制理論的世界、負(fù)反饋、控制論、PID、調(diào)節(jié)器等章節(jié),展現(xiàn)了PID的發(fā)展歷程

均勻控制系統(tǒng)大多采用簡單控制、串級控制、雙沖量控制三種不同的形式,其實(shí)現(xiàn)方法和所用設(shè)備也類同于這三種控制系統(tǒng),故障檢查及處理方法可參考昌暉儀表網(wǎng)“過程控制”欄目介紹的這三種控制系統(tǒng)

安全柵屬于電動(dòng)單元組合儀表的輔助單元,其主要用途是防爆系統(tǒng)的隔離裝器置。安全柵將來自危險(xiǎn)區(qū)的信號經(jīng)隔離變送,輸出隔離的電流信號到安全區(qū),安全柵應(yīng)用在本安防爆系統(tǒng)中,通過限流和限壓電路限制了送往現(xiàn)場回路的能量,從而防止非本安電路的危險(xiǎn)能量串入本安電路。

溫度控制是能量平衡的表現(xiàn),而且往往是需要嚴(yán)格控制的工藝參數(shù)。溫度被控對象本身的響應(yīng)速度比較慢,干擾也很多。有的溫度控制需要精細(xì)的調(diào)整溫控器PID參數(shù),有的必須采用復(fù)雜的變結(jié)構(gòu)PID控制策略,有的需要重新定義問題例如選擇靈敏板溫度或者選擇溫差控制,甚至有時(shí)候必須把…

筆者認(rèn)為:在單變量控制問題上和PID比較,和歷史上的其他算法一樣,AI應(yīng)該不會(huì)有太大的優(yōu)勢。用AI控制pH更多是技術(shù)可行性。用AI提高人類的勞動(dòng)效率,并不是替代成熟的解決方案,而是找到原來存在問題的解決方案進(jìn)行升級

PID控制的難點(diǎn)不在于技術(shù),而在于藝術(shù)。要從會(huì)用PID到用好PID,需要的不僅是知識,更是實(shí)踐和思考。正如辛斯基所言,過程控制更像是一門藝術(shù)。這種藝術(shù)性不是天生的,而是通過長期的積累和反復(fù)的實(shí)踐獲得的。對于每一個(gè)想要深入掌握PID調(diào)節(jié)的人來說,或許最重要的就是保持對細(xì)…

哪些儀表需要設(shè)置電涌防護(hù)器?回答這個(gè)問題要分兩個(gè)步驟:首先按照SH/T3164-2021第5章的規(guī)定判斷是否需要實(shí)施儀表防雷工程;其次,如需要實(shí)施儀表防雷工程,則設(shè)置電涌防護(hù)器。反之,則不設(shè)置電涌防護(hù)器
可燃有毒氣體報(bào)警器總線輪訓(xùn)、斷線及丟包等等問題,嚴(yán)重干擾GDS系統(tǒng)的正常使用,節(jié)省電纜費(fèi)用的同時(shí),嚴(yán)重削弱了GDS應(yīng)有的保護(hù)功能。隨著各級部門監(jiān)管的深入,GDS系統(tǒng)總線方式基本已經(jīng)杜絕。不涉及到重大危險(xiǎn)源的可燃有毒氣體報(bào)警器可采用總線方式,但是涉及到重大危險(xiǎn)源的GDS…

采用4:1和10:1衰減曲線法整定調(diào)節(jié)器參數(shù)時(shí)應(yīng)注意以下幾點(diǎn)

精餾塔分離原理是利用混合液中各組分的相對揮發(fā)度不同(沸點(diǎn)不同),即在同一溫度下各組分的蒸氣壓不同這一性質(zhì),使液相中的輕組分(低沸物)和氣相中的重組分(高沸物)互相轉(zhuǎn)移,從而實(shí)現(xiàn)組分分離的目的

在選擇性控制系統(tǒng)中防止積分飽和的方法有三種:限幅法、外反饋法和積分切除法,本文簡單介紹這些具體方法

控制質(zhì)量的好壞與組成控制系統(tǒng)的四個(gè)環(huán)節(jié)的特性有關(guān),當(dāng)系統(tǒng)工作一段時(shí)間后,這四個(gè)環(huán)節(jié)的特性都有可能發(fā)生變化,以致影響控制質(zhì)量。所以控制系統(tǒng)在運(yùn)行一段時(shí)間后,往往要對調(diào)節(jié)器的PID參數(shù)重新進(jìn)行整定,以適應(yīng)工況的變化,滿足對控制質(zhì)量的要求