解決方案1
對于FWKO罐,液位為控制變量,出口流量閥LCV-101為操縱變量。對于分離器,由于泵的非線性動力學,采用串級液位(LC-102)輸出流量(FC-101)控制回路來改進液位控制。
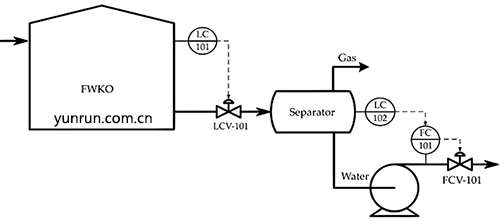
這是非常常見的物料平衡控制方案,一般都不需要使用先進控制。先進控制的方案也沒有出彩的地方,方案如下:

但是如果約束條件發生變化,ARC和APC會很不同。
挑戰是分離器的容量比FWKO小得多。FWKO出口流量的波動很容易影響分離器液位控制器LC102。在最初幾年的運行中,經常因為分離器高液位聯鎖導致停車。
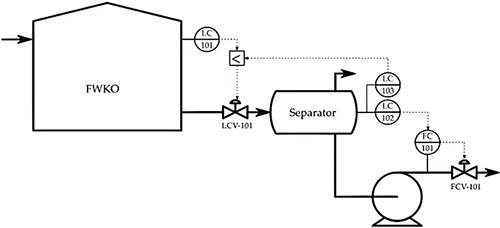
解決方案2
為了防止高液位聯鎖,分離器上的同一液位高液位控制器LC103用于和FWKO罐液位控制器LC101組成了超馳保護控制。直接用APC實現就是CV2高優先級范圍控制,并優化到設定值。其實CV2優化到范圍下限是緩沖更大的更優化方案,優化到設定值是直線思維。
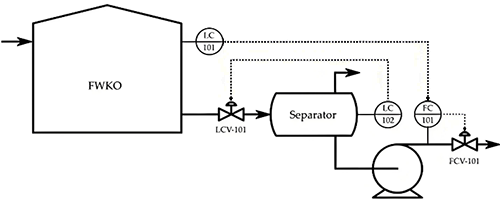
解決方案3
分離器液位控制由進口流量控制閥LCV-101控制,FWKO罐液位由泵排出處的控制閥(FCV-101)控制。直接用APC實現控制方案不變,仍是是CV2高優先設定值控制。這說明解決方案2和3的本質是類似的,雖然看起來解決方案2的更大利用了分離器的緩沖,但是這個區別比較小。
當是確定性的單變量強因果被控對象時,PID當仁不讓。當是多個變量控制時,確定的配對關系可以使用基于PID的控制方案設計,但是靈活性不如先進控制。盡管在DCS修改控制方案的成本很低值得推廣。但是,當MV的控制權不能從一而終時,基于PID的控制方案設計可能很復雜,至簡至優的控制方案更需要理解本質。而且在線修改控制方案的難度與壓力都很大。
因為先進控制是本質多變量的,控制權切換可以自動完成,多變量控制也不需要設計只需要修改模型和參數。雖然先進控制要付出較大的成本,但是能更極致的挖掘設備性能,在復雜的大裝置上值得實施。