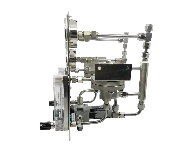
上圖是常見的,給下游裝置用泵輸送供料的流量控制的場景設計。前面是進料緩沖罐液位控制,泵后是流量控制。這是標準的單回路控制。如果用先進控制實現,則控制方案設計如下:
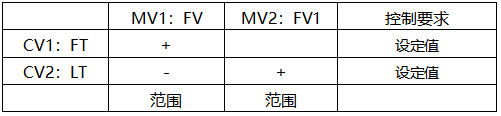
當沒有約束時,兩種控制方案是等價的。當FIC的設定值太高,超出了FV1的調節能力,則緩沖罐液位會失控逐漸降低。如果液位太低則存在汽蝕的風險。如果人為限制FIC的設定值高限,則可能損失部分產能。
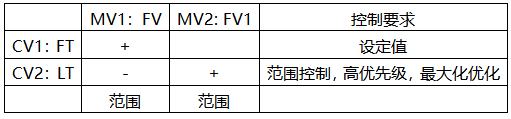
可以考慮增加低液位與流量控制的超馳控制的基于PID的控制方案,如下所示:

這個方案如果用APC如何實現呢?變量和模型都不需要變化,只需要將液位控制設置成范圍,上限是LIC的設定值,下限是LIC2的設定值,而且將LT這個CV設置成高優先級并進行最大化優化就能實現上述復雜控制方案。當LT在范圍內時,PID控制器用FV控制FT在設定值,并用FV1將LT向范圍上限優化。如果FT的設定值超過了FV1的最大流量,則LT在范圍內浮動。如果FT的設定值持續超過FV1的最大流量,導致LT低于其范圍下限,則高優先級生效,FV放棄對FT設定值的控制,全力保證LT在范圍內。
如果上下限不合理導致LT失控,則是授權不充分或者設備限制,超出了APC的能力,PID控制器設計時不用考慮。
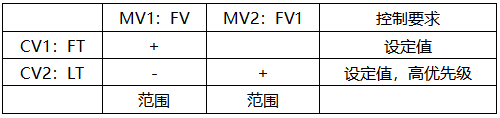
其實,還有一種重新配對的嵌套控制方案,如下所示。流量控制的生效需要LIC投自動,而且流量被控對象特性和液位的控制品質相關。盡管看起來是兩個單回路,但是由于兩個單回路利用了回路間的耦合關系,這是一種隱藏的復雜控制形式。這種嵌套控制回路已經是多變量的一種控制策略了。

這個方案如果用APC如何實現呢?變量和模型都不需要變化,只需要將LT這個CV設置成高優先級就能實現上述復雜控制方案。如何時候首先保證液位在設定值,如果有自由度則保證FT也在設定值,否則自動放棄流量控制。
當使用PID設計控制方案時,為了保證至簡至優,會強調MV的從一而終。MV控制權的切換會增加方案的復雜性,但是收益有限。簡單方案的適用范圍是有限的。嵌套控制方案,無論是設計難度還是理解難度都很大。當使用APC進行控制時,變量和模型不變,僅僅通過控制要求和參數的不同就能適應變化的控制要求。
作者:馮少輝博士