兩個過程變量直接存在如下的關系:FT2=R×FT1,式中FT2為從過程變量;FT1為主過程變量;R為比值系數。
比值控制其實就是一個乘法器。在很多控制系統中一般都有專門的比值控制模塊。但是有的現場采用如圖1所示的比值控制策略:①使用計算模塊計算當前測量的實際比值FT2/FT1;②以該比值為測量值,使用PID算法進行從過程變量的控制。

圖1 常見的比值控制策略
看起來很自然,如果這種控制策略沒有問題,控制系統為什么要提供專門的比值控制模塊呢?那么這種控制策略有什么問題呢?
使用如圖1所示的基于PID的比值控制策略,存在的問題包括:
①對比值控制回路而言,被控對象的模型增益可以利用對比值計算求導得到為1/FT1。當主過程變量大幅度調整時被控對象增益也相應變化,這增加了PID參數整定的難度,而且在主過程變量測量值不同時控制回路有不同的控制性能。
②當從過程變量變化時比值控制會波動,而且由于非線性的存在,比值控制器往往整定得比較慢,從過程變量跟蹤慢會導致比值控制波動。
③當從過程變量波動時,比值控制輸出應該保持不變。從過程變量控制回路通過控制調節閥使從過程變量回到設定值就可以了。但是由于從過程變量參與到比值計算中,反而會導致PID控制器的多余動作。這種設計,比值測量值不能算從過程變量控制回路的獨立變量,在先進控制器設計中也要避免。
標準的比值控制模塊中,會使用兩個過程變量的比值作為測量值,這個測量值只用于顯示,不用于控制作用計算。而實際的PID控制器輸出,用比值控制模塊的設定值乘以主過程變量得到,這個方法可以通過控制方案的改進,避免人為引入非線性,降低PID控制器參數整定的難度。從過程變量的測量值只參與計算而不參與比值控制。如圖2所示的單閉環比值控制策略是最常見的標準比值控制方案。

圖2 單閉環比值控制策略
在比值控制精度要求較高而主過程變量又具備控制條件的場合下,很自然地就想到對主過程變量也進行控制,這就形成了如圖3所示的雙閉環比值控制系統。和單閉環比值控制系統的主要區別在于增加了主過程變量控制回路。由于主過程變量的控制,克服了干擾的影響,使主過程變量更加平穩。當然與之成比例的從過程變量也更加平穩。當系統需要升降負荷時,只要改變主流量的設定值,主從過程變量就會按比例同時增加或減小,從而克服單閉環比值控制系統的缺點。在實際應用中,當主過程變量設定值變化時,從過程變量控制跟隨的速度如果不夠快,也會造成比值波動。此時可以考慮使用主過程變量設定值進行比值計算并讓兩個控制回路的期望閉環時間常數λ相等來減少這種波動。

圖3 雙閉環比值控制策略
即使采用雙閉環比值控制系統,在主過程變量增加和減小時實際比值仍然會發生波動。有一類過程比值受到安全的限制,只允許比值單向波動,例如燃燒系統的空燃比、煤氣化的氧煤比等。這種情況下就要使用交叉限幅控制。
空燃比的交叉限幅原理見圖4。交叉限幅控制說簡單點就是燃料的流量與空氣的流量相互影響相互牽制,最終達到一個平衡點就是合適的空燃比。
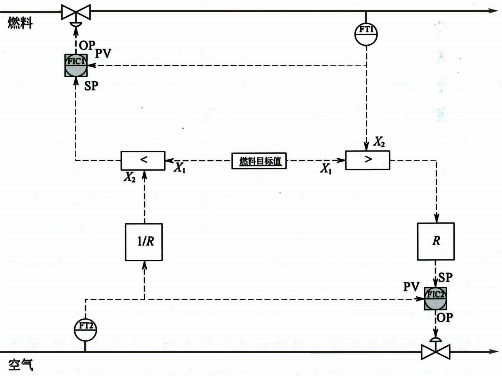
圖4 空燃比交叉限幅控制
交叉限幅實際上是一個具有兩個并聯回路的串級調節系統,控制策略的復雜性是工藝過程的要求決定的,這樣達到的目的有:
①增加燃料時,為了防止缺氧燃燒,需要確保空燃比始終偏大,所以先增加空氣流量,然后通過“低選器”實現空氣流量為主過程變量,燃料流量為從過程變量的比值控制;
②減少燃料時,為了防止缺氧燃燒,需要確保空燃比始終偏大,所以先降低燃料流量,然后通過“高選器”實現燃料流量為主過程變量,空氣流量為從過程變量的比值控制。
這樣就構成了交叉限幅。交叉限幅控制在系統平穩時是靜止的。只有燃燒系統的平衡被打破后交叉限幅控制才起作用,在系統平衡時,燃料流量控制與空氣流量控制是獨立的兩個控制回路。當燃料流量或空氣流量發生變化時,根據設定好的空燃比的計算來影響另一個量,最終達到燃燒控制的新平衡,所以說交叉限幅是動態比值控制。如果希望比值單側波動并且對波動的幅度有要求時,還有更復雜的雙交叉限幅。