在振蕩控制回路中,重點(diǎn)是要觀察過(guò)程變量和PID控制器輸出的峰谷時(shí)間的振蕩相位關(guān)系。如果PID控制器輸出處于峰谷時(shí)的時(shí)間點(diǎn),過(guò)程變量也差不多同時(shí)處于峰或谷,則可能是比例作用太強(qiáng)引起的。將比例增益減半往往振蕩就會(huì)逐漸消失,如果比例增益減半后振蕩幅度反而變大,則說(shuō)明有周期性外部擾動(dòng)影響該控制回路。相反地,如果過(guò)程變量與PID控制器輸出在明顯不同的時(shí)間點(diǎn)達(dá)到波峰或波谷,則可能是積分作用太強(qiáng)造成的。將積分時(shí)間翻倍往往振蕩就會(huì)逐漸消失。將積分時(shí)間設(shè)置為峰值到峰值的振蕩周期則更保守和安全。
如圖1所示,如果PID控制器輸出和過(guò)程變量同時(shí)達(dá)到極值(波峰或波谷),即兩者同相位振蕩,通常是由比例增益過(guò)強(qiáng)引起的。比例作用太強(qiáng)引起的振蕩可以總結(jié)為:
波峰波谷同時(shí)刻,升降同時(shí)同拐點(diǎn);
波動(dòng)周期都一樣,靜態(tài)偏差沒(méi)法辦。
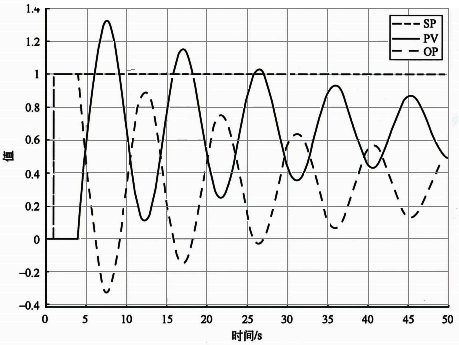
圖1 比例作用太強(qiáng)引起的振蕩
如圖2所示,過(guò)程變量與PID控制器輸出在明顯不同的時(shí)間點(diǎn)達(dá)到波峰或波谷,即兩者異相位振蕩,則可能是積分作用太強(qiáng)引起的。積分作用太強(qiáng)引起的振蕩可以總結(jié)為:
極值中間同時(shí)刻,此消彼長(zhǎng)異相位;
積分作用適當(dāng)用,消除余差不波動(dòng)。
引起的振蕩")
圖2 積分作用太強(qiáng)引起的振蕩
如圖3所示,如果過(guò)程變量呈方波形式振蕩,而PID控制器輸出呈鋸齒形狀振蕩,原因很可能是閥門(mén)存在非線性,如黏滯或靜摩擦。另一個(gè)原因可能是PID控制器輸出達(dá)到飽和點(diǎn),例如全關(guān)或全開(kāi)。如果調(diào)節(jié)閥上沒(méi)有定位器,也可能存在滯后問(wèn)題。當(dāng)存在滯后時(shí),PID控制器輸出上升,閥門(mén)位置可能偏低,但控制輸出下降,閥門(mén)位置可能偏高。在這些情況下,問(wèn)題出在設(shè)備上而不是PID控制器參數(shù)。一般來(lái)說(shuō),當(dāng)過(guò)程變量振蕩但形狀不是平滑曲線時(shí),很可能是設(shè)備問(wèn)題。這種情況下首先應(yīng)該對(duì)設(shè)備進(jìn)行維修減少非線性。如果PID控制器輸出和過(guò)程變量的動(dòng)態(tài)特性比較緩慢,通過(guò)和更快的副過(guò)程變量組成串級(jí)控制,也可能顯著改善控制性能。

圖5 終控制元件非線性引起的振蕩