本文主要針對愛普生4軸機器人如何建立工具坐標(biāo)系及其驗證進行詳細闡述。
1、建立與機器人之間的通信:通過EPSON RC+軟件,點擊設(shè)置>>電腦與控制器通信,實現(xiàn)PC與機器人之間的通信,這里可以采用USB或者以太網(wǎng)通信。

2、打開工具向?qū)В和ㄟ^EPSON RC+軟件,點擊工具>>機器人管理器>>工具>>工具向?qū)В蜷_工具向?qū)А?/span>
3、選擇工具編號:這里可以選擇一個需要創(chuàng)建的工具編號,本例為工具1。
建的工具編號")
4、愛普生4軸機器人建立工具坐標(biāo)系示教第一個參考點:直接點擊示教即可。
系教程")
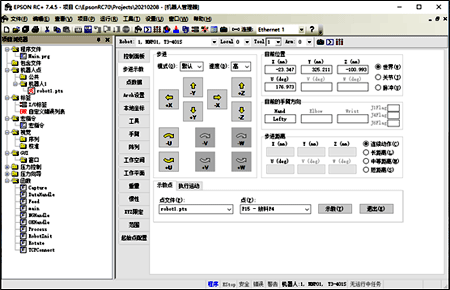
5、工具向?qū)В瑦燮丈?軸機器人建立工具坐標(biāo)系示教參考點1:在步進示教界面,控制U軸為0°,接著再控制XY,將工具的中心對準特征點,完成后點擊示教按鈕。
系")
6、愛普生4軸機器人建立工具坐標(biāo)系示教第二個參考點:直接點擊示教即可。
系")
7、工具向?qū)В瑦燮丈?軸機器人建立工具坐標(biāo)系示教參考點2:在步進示教界面,控制U軸為180°,如果由于機械原因,旋轉(zhuǎn)不了180°也沒關(guān)系,接著再控制XY,將工具的中心對準特征點,完成后點擊示教按鈕。
系示例")
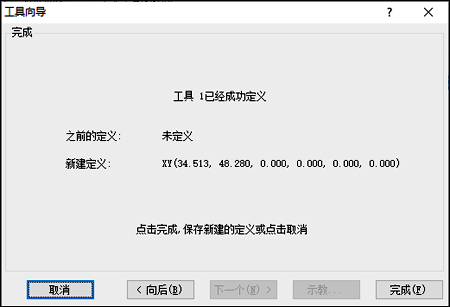
8、愛普生4軸機器人建立工具坐標(biāo)系示教完成。
9、愛普生4軸機器人建立工具坐標(biāo)系示教完成后,需要進行驗證,在步進示教界面,切換Tool為剛剛示教的工具1,然后旋轉(zhuǎn)U軸,觀察工具的中心是否始終對準特征點,如果始終對準,說明該工具可用,如果存在偏移,說明需要重新創(chuàng)建工具。
相關(guān)閱讀
機器人離線編程軟件CAM和生產(chǎn)系統(tǒng)仿真軟件CAE的區(qū)別